Mecánica clásica Newtoniana
1.1. Historia de la mecánica clásica
1.2. Noción de movimiento de un cuerpo
1.3. Modelos de cuerpos que se emplean en la mecánica clásica
1.4. Espacio, tiempo, masa y fuerza
1.5. Leyes de Newton
1.5.1. Sistema de referencia inercial y transformaciones de Galileo
1.6. Principios de Stevin
1.7. Transmisibilidad y superposición de causas y efectos
1.8. Diagrama de cuerpo libre
1.9. Ley de la gravitación universal
1.10. La metrología en la mecánica clásica
1.1. Historia de la mecánica clásica
El físico y astrónomo italiano Galileo reunió las ideas de otros grandes pensadores de su tiempo y empezó a analizar el movimiento a partir de la distancia recorrida desde un punto de partida y del tiempo transcurrido. Demostró que la velocidad de los objetos que caen aumenta continuamente durante su caída. Esta aceleración es la misma para objetos pesados o ligeros, siempre que no se tenga en cuenta la resistencia del aire (rozamiento). El matemático y físico británico Isaac Newton mejoró este análisis al definir la fuerza y la masa, y relacionarlas con la aceleración. Para los objetos que se desplazan a velocidades próximas a la velocidad de la luz, las leyes de Newton han sido sustituidas por la teoría de la relatividad de Albert Einstein. Para las partículas atómicas y subatómicas, las leyes de Newton han sido sustituidas por la teoría cuántica. Pero para los fenómenos de la vida diaria, las tres leyes del movimiento de Newton siguen siendo la piedra angular de la dinámica (el estudio de las causas del cambio en el movimiento).
Las primeras ideas claras sobre el universo mecánico en que vivimos fueron dadas por los filósofos griegos. Uno de los más brillantes fue Pitágoras de Samos, quien vivió en Crotona en el sur de Italia y fundó la Escuela Pitagórica. El más brillante representante de esta escuela fue Filolao de Crotona quien nació en 480 a.C. un siglo después de su maestro.

1.2. Noción de movimiento de un cuerpo
El movimiento de los cuerpos se estudia mediante la cinemática y la dinámica y ambas se integran dentro de la mecánica. La mecánica clásica estudia fenómenos que involucran cuerpos macroscópicos con velocidades pequeñas comparadas a la de la luz.
Por otra parte, la mecánica cuántica describe las leyes del comportamiento de partículas subatómicas con velocidades cercanas a la de la luz. Por último, el movimiento de cuerpos sujetos a fuertes campos gravitatorios se estudia en el marco de la relatividad general.
Tipos de movimiento
- Movimiento rectilíneo. Describe un cuerpo cuya trayectoria es lineal y con una velocidad y aceleración paralelas. Suele estudiarse en dos casos puntuales:
- Movimiento Rectilíneo Uniforme. Describe un cuerpo que posee velocidad constante, es decir, aceleración nula.
- Uniformemente acelerado. Describe un cuerpo que posee una aceleración constante.
- Movimiento circular uniforme. Describe un cuerpo que se mueve alrededor de un eje de giro, con un radio y una velocidad angular constantes, trazando una circunferencia. En este tipo de movimiento los cuerpos poseen una aceleración en dirección al centro del círculo.
- Movimiento armónico simple. Describe un movimiento periódico como puede ser el de un péndulo o el de una onda electromagnética (luz, por ejemplo). Matemáticamente está descrito en el tiempo por una función armónica (seno o coseno). El movimiento puede no ser armónico, es decir, no repetirse en el tiempo, pero aun así describir trayectorias ondulatorias y en ese caso se lo denomina movimiento ondulatorio.
- Movimiento parabólico. Describe un movimiento que traza una parábola. Es el resultante de la composición de un movimiento rectilíneo uniforme horizontal y uno uniformemente acelerado vertical. Un ejemplo de este tipo de movimiento es el que realiza una pelota que se lanza hacia arriba con un ángulo con respecto a la horizontal

Elementos del movimiento
- Trayectoria
- Rectilínea
- Curvilíneo
- Elíptico
- Parabólico
- Distancia
- Aceleración
- Velocidad
1.3. Modelos de cuerpos que se emplean en la mecánica clásica

- Modelos Materiales
Partícula: Porción de materia de dimensiones despreciables, comparadas con la de su marco de referencia.
Cuerpo: Porción de materia de dimensiones apreciables, en cuanto a las de su marco de referencia.
Punto masa: Representación de un cuerpo por medio de un punto geométrico, al que se le asocia la masa del cuerpo.
Cuerpo rígido: Cuerpo en donde todas las partículas conservan sus posiciones relativas entre sí, bajo cualquier condición de carga, es decir, no se deforma
Cantidad física: Medida de un fenómeno físico, la cual puede expresarse de forma escalar o vectorial.
Cantidad escalar: Son aquellas que para cualquier sistema de referencia permanecen invariantes.
Cantidad vectorial: Son aquellas de las cuales es necesario conocer la magnitud, dirección y sentido para quedar definidas completamente.
1.4. Espacio, tiempo, masa y fuerza
Espacio aquello que es implicado por los cuerpos, o sea, el lugar que ocupan éstos, su límite inmóvil, siendo la suma de los espacios ocupados por los cuerpos, el espacio total, eliminando el concepto de vacío.
Tiempo es una magnitud física que se utiliza para medir la simultaneidad, duración y separación de todo acontecimiento dado.

Masa se expresa como la cantidad de materia que hay en un objeto o cuerpo; todo objeto posee una más sin importar su estado ya sea sólido, liquido o gaseoso. La masa, así como la energía no puede destruirse o construirse, sino reducirse a sus componentes más elementales.
Fuerza la fuerza que incide sobre un cuerpo es responsable de los cambios en su estado de movimiento, tales como su trayectoria rectilínea y su desplazamiento uniforme, y de imprimirle una aceleración (o desaceleración). Además, toda fuerza actuando sobre un cuerpo genera una fuerza idéntica, pero en sentido contrario.
1.5. Leyes de Newton
Primer ley o ley de inercia
Todo cuerpo permanece en su estado de reposo o de movimiento rectilíneo uniforme a menos que otros cuerpos actúen sobre él.

Es decir, si sobre un cuerpo no actúa ningún otro, este permanecerá indefinidamente moviéndose en línea recta con velocidad constante (incluido el estado de reposo, queequivale a velocidad cero).
Segunda ley o Principio Fundamental de la Dinámica
La fuerza que actúa sobre un cuerpo es directamente proporcional a su aceleración.

Se encarga de cuantificar el concepto de fuerza. Nos dice, que la fuerza neta aplicada sobre un cuerpo es proporcional a la aceleración que adquiere dicho cuerpo. La constante de proporcionalidad es la masa del cuerpo, de manera que podemos expresar la relación de la siguiente manera: F = m a
Tercera ley o Principio de acción-reacción
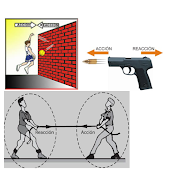
Cuando un cuerpo ejerce una fuerza sobre otro, éste ejerce sobre el primero una fuerza igual y de sentido opuesto. Esta ley nos dice si un cuerpo A ejerce una acción sobre otro cuerpo B, éste realiza sobre A otra acción igual y de sentido contrario.
1.5.1. Sistema de referencia inercial y transformaciones de Galileo
Se denominan sistemas de referencia inerciales a aquellos en los que se cumple el principio de inercia: para que un cuerpo posea aceleración ha de actuar sobre él una fuerza exterior. En estos sistemas se cumplen, por extensión los otros dos principios de la dinámica de Newton.

Transformaciones de Galileo
Son ecuaciones que permiten relacionar las observaciones que se realizan del movimiento de una partícula desde dos sistemas de referencia inerciales. Los sistemas inerciales son aquellos que permanecen en reposo o se mueven con movimiento rectilíneo uniforme.
Por simplicidad, al sistema de referencia en reposo lo llamaremos S y al otro sistema, el cual se mueve a velocidad constante con respecto a S, lo denominaremos con S'. Galileo estableció la relación entre ambos sistemas.

1.6. Principios de Stevin

El teorema o principio de Stevin es ley fundamental de hidrostática, que relaciona la variación de las presiones atmosféricas y líquidas. Se describe la declaración de la siguiente manera:
«La diferencia entre las presiones de dos puntos de un fluido de equilibrio (en reposo) es igual al producto entre la densidad del fluido, la aceleración de la gravedad y la diferencia entre las profundidades de los puntos... «
1.7. Transmisibilidad y superposición de causas y efectos
Transmisibilidad
El principio de transmisibilidad se usa en la física con el que se rigen los puntos de aplicación de una fuerza. Estos se mueven en cualquier lugar a lo largo de su línea de acción, sin llegar a cambiar las fuerzas de reacción externas en un cuerpo que se encuentra en estado rígido.
Cualquier fuerza que tenga la misma magnitud, dirección y que mantengan un punto de aplicación, en algún lugar a lo largo de la línea de acción, provocará una aceleración. Por lo tanto, los puntos donde se ejercen las fuerzas de la transmisibilidad se moverán a lo largo de la línea de acción.
Este principio nos dice que el punto de aplicación de las fuerzas será primero el efecto externo de una fuerza que no se modifica, siempre y cuando sea trasladada en su misma dirección. Es decir, si queremos mover un cuerpo de manera horizontal aplicando una fuerza determinada, el resultado será el mismo si lo empujamos o si lo jalamos.

Superposición de causa y efecto
El principio de superposición se define como "el efecto de la suma de acciones es la suma de cada efecto de cada acción".
Este principio se cumple y se puede aplicar siempre y cuando el comportamiento de los materiales sea lineal.
1.8. Diagrama de cuerpo libre
El diagrama de cuerpo libre (DCL) de un cuerpo es una figura donde se muestra únicamente el cuerpo en cuestión (aislado conceptualmente de los demás cuerpos a su alrededor), junto con todas y cada una de las fuerzas que actúan sobre él.
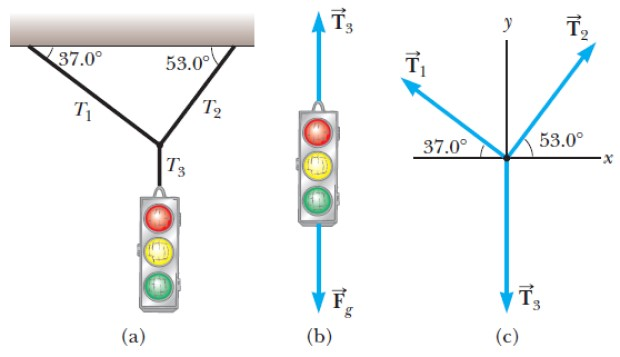
Hay que asegurarse de incluir en el diagrama todas las fuerzas que actúan sobre el objeto, y como se trata de una magnitud vectorial, la flecha se encarga de señalar su dirección y su sentido, mientras que la longitud de la misma proporciona una idea del módulo o intensidad.
1.9. Ley de la gravitación universal
La ley implica que mientras más cerca y más masivos sean dos cuerpos, más intensamente se atraerán.
“La fuerza con que se atraen dos objetos es proporcional al producto de sus masas e inversamente proporcional al cuadrado de la distancia que los separa”
Esto significa que dos cuerpos cualesquiera se atraen con una fuerza mayor o menor según su masa sea mayor o menor, y según la distancia entre ellos.
La fórmula fundamental de la Ley de Gravitación Universal es la siguiente:F = | (G. m1 . m2) / r² |. r*En donde:
- F es la fuerza de atracción entre dos masas
- G es la constante de gravitación universal (6,673484.10-11 N.m2/kg2)
- m1 es la masa de uno de los cuerpos
- m2 es la masa de otro de los cuerpos
- r la distancia que los separa.
- r* es el vector unidad que indica la dirección de la fuerza
1.10. La metrología en la mecánica clásica
La metrología es la ciencia que se ocupa de las mediciones, unidades de medida y de los equipos utilizados para efectuarlas, así como de su verificación y calibración periódica.
La mecánica se puede dividir en tres partes:
- Mecánica de cuerpos rígidos*

- Mecánica de cuerpos deformables
- Mecánica de fluidos

*La mecánica de cuerpos rígidos se subdivide en estática y dinámica:
Estática: Estudia el equilibrio de los cuerpos en reposo o con velocidad.
Dinámica: Estudia los cuerpos en movimiento acelerado.
- Encuentra aquí información de Historia de la Mecánica para tu escuela ¡Entra ya! | Rincón del Vago (rincondelvago.com)
- Movimiento: Concepto, Tipos, Elementos y Ejemplos
- 1 fundamentos de la mecánica clásica newtoniana (unam.mx)
- Concepto de espacio - Definición en DeConceptos.com
- https://concepto.de/fuerza/#ixzz7fdITMklK
- Leyes de Newton (cica.es)
- Sistemas de referencia inerciales (mec.es)
- Transformaciones de Galileo - Relatividad Especial (weebly.com)
- Principio de Stevin - Física - Definiciones y conceptos
- El Teorema De Stevin: Ley Fundamental De La Hidrostática ▷➡️ UnComoHacer ▷➡️
- Principio de transmisibilidad - Principio de
- Qué es el principio de superposición y cuándo se puede - ingenio.xyz (ingenioxyz.com)
- Principio de superposición - Principio de
- Diagrama de cuerpo libre: qué es, cómo hacerlo, ejemplos, ejercicio (lifeder.com)
- IV_DCL.pdf (uam.mx)
- https://concepto.de/ley-de-gravitacion-universal/#ixzz7fe5r62Mk
- Encuentra aquí información de Historia de la Mecánica para tu escuela ¡Entra ya! | Rincón del Vago (rincondelvago.com)


Comentarios
Publicar un comentario